De toutes les relations précédentes (Équations de Maxwell et lois de comportement), on peut normalement déduire les champs ${\bf h}$, ${\bf b}$, ${\bf e}$ et ${\bf d}$ à partir des sources ${\bf j}$ et $\rho_q$. Par contre, ils nous manque des informations si on désire déterminer les énergies et les forces dans le système étudié. C’est ce qui va nous intéresser dans cette partie.
Il faudra un peu d'efforts pour retrouver comment les calculer…
Sous-sections de Grandeurs globales
Grandeurs globales : énergies
Bilan de puissance (échelle locale)
Comme depuis le début, nous allons continuer de travailler à l’échelle locale. Pour ce faire, sortons quelque temps de l’ARQS et introduisons le vecteur de Poynting ${\bf \Pi_p}$, défini par :
$${\bf \Pi_p} = {\bf e}\wedge{\bf h}$$
Pour un système électromagnétique contenu dans un volume $V$ de bord $\partial V = S$, la puissance énergétique $P_{\text{em}}$ apportée sous forme électromagnétique au système est donnée par le flux entrant de ${\bf \Pi_p}$, soit :
$p_j$ : densité volumique de puissance dissipée par effet Joule
$p_{mag}$ : densité volumique de puissance magnétique
$p_{el}$ : densité volumique de puissance électrostatique
Pertes Joule
Le premier terme du bilan de puissance précédent permet de calculer $P_J$ la puissance dissipée par effet Joule (production de chaleur). Il n’existe que dans les domaines conducteurs. Si nous regroupons ces derniers dans ce que nous appellerons $V_c$, on aura :
Dans le cas d’un conducteur portant un courant $I$, on peut directement identifier sa résistance $R$ grâce aux pertes Joule, car $P_J = R\,I^2$. Ainsi :
La variation élémentaire de densité volumique d’énergie pendant $\text{d} t$ est ainsi :
$$\text{d}\,w_{mag} = p_{mag}\,\text{d} t = {\bf h}\cdot\frac{\partial\,{\bf b}}{\partial t}\,\text{d} t$$
On peut alors en déduire la densité volumique d’énergie magnétique emmagasinée dans le système (à l’instant $t$ correspondant au point de fonctionnement magnétique $({\bf h},{\bf b})$) par :
$$w_{mag} = \int_{t_0}^t {\bf h}\cdot\frac{\partial\,{\bf b}}{\partial t}\,\text{d} t = \int_{0}^{b} {\bf h}\cdot{\bf d b}$$
La borne d’intégration inférieure étant choisie arbitrairement pour correspondre à une « énergie stockée nulle » reflétant l’état initial du système.
Dans le cas particulier de milieux où la loi de comportement magnétique est linéaire (${\bf h}=\nu\,{\bf b}$), on a :
$$\begin{aligned}\text{d}\,\widetilde{w}_{mag} &= \text{d}\left({\bf h}\cdot{\bf b}\right) - \text{d}\,w_{mag} \\ &= {\bf d h}\cdot{\bf b} + \cancel{{\bf h}\cdot{\bf d b}} - \cancel{{\bf h}\cdot{\bf d b}} \\ &= {\bf b}\cdot{\bf d h}\end{aligned}$$
On en déduit donc :
$$\widetilde{w}_{mag} = \int_{0}^{h} {\bf b}\cdot{\bf d h}$$
Comme précédemment, la borne d’intégration inférieure est choisie arbitrairement pour correspondre à une « énergie stockée nulle » reflétant l’état initial du système.
Dans le cas particulier de milieux où la loi de comportement magnétique est linéaire (${\bf b}=\mu\,{\bf h}$), on a :
En linéaire dans l’ARQS, lorsque les sources de champs sont des courants situés dans un sous-volume conducteur $V_c$, nous disposons d’une autre formule de calcul de l’énergie magnétique créée par ces courants reposant sur le potentiel vecteur magnétique.
En effet, d’après ce qui précède, dans ce cas :
$$W_{mag} = \iiint_V \frac{1}{2}\,{\bf h}\cdot{\bf b}\,\text{d} V $$
On peut développer avec une identité vectorielle :
$$W_{mag} = \frac{1}{2}\left(\iiint_V {\bf rot\,h}\cdot{\bf a}-\text{div}({\bf h}\wedge{\bf a})\,\text{d} V \right)$$
En réinjectant Maxwell-Ampère et en appliquant le théorème de la divergence, on obtient :
$$W_{mag} = \frac{1}{2}\left(\iiint_{V_c} {\bf a}\cdot{\bf j}~ \text{d} V + \oiint\limits_{S=\partial V} ({\bf a}\wedge{\bf h})\cdot{\bf d S} \right)$$
On notera que l’intégrale volumique se limite au domaine conducteur $V_c$ (seul siège de courants).
Ainsi, pour un système électromagnétique contenu dans un volume choisi suffisamment grand pour que l’influence des sources soient négligeable sur la frontière (${\bf a}$ et/ou ${\bf h}$ nul), on obtient finalement :
Cette formule pourra s’avérer très utile en pratique.
Cas particulier des aimants permanents
En présence de matériaux durs tels que les aimants, nous ne sommes plus sur une courbe $b(h)$ passant par l’origine, mais les formules générales précédentes restent valables.
Nous allons juste choisir des bornes inférieures différentes :
$b(h=0) = b_r$ pour l’énergie ;
$h(b=0) = -h_c$ pour la coénergie.
Graphiquement, on peut ainsi représenter les densités correspondantes sur la figure suivante :
Représentation des densités volumiques d'énergie et coénergie magnétiques dans un aimant
Alors :
$${w}_{mag} = \int_{b_r}^{b} {\bf h}\cdot{\bf d b},~ ~ \text{et} ~ ~\widetilde{w}_{mag} = \int_{-h_c}^{h} {\bf b}\cdot{\bf d h}$$
Dans le cas classique de matériaux très durs où la courbe ci-dessus peut être assimilée à une droite, on a ainsi :
Chose un peu surprenante, l’expression des densités d’énergie et coénergie magnétiques dans un aimant permanent est l’inverse de celles dans les autres matériaux. Soit :
Tout ce que nous avons fait en magnétisme ci-avant, peut se développer également en électrostatique à partie de la densité volumique de puissance $p_{el}$. Plutôt que de tout redévelopper, nous allons procéder par analogie :
${\bf h} \leftarrow {\bf e}$
${\bf b} \leftarrow {\bf d}$
$\mu \leftarrow \varepsilon$
Ainsi, en ne considérant que le cas linéaire, nous obtenons, pour les densités volumiques d’énergie et coénergie électrostatiques :
L’énergie électrostatique contenue dans le système est alors :
$$\boxed{W_{el} = \iiint_V \frac{1}{2}\,\varepsilon\,\lVert{\bf e}\rVert^2~\text{d} V = \widetilde{W}_{el}}$$
Astuce
Nous disposons également d’une formule pour l’énergie basée sur le potentiel scalaire électrique $v$. Considérant que la densité volumique de charge $\rho_q$ se situe dans un sous-volume $V_q$ de $V$, on a :
On aurait pu donner l’ensemble des relations possibles en considérant le cas non-linéaire, mais nous ne l’avons pas fait par souci de concision. On peut quand même fournir les densités volumiques d’énergie qui pourront, le cas échéant servir de point de départ :
Pour calculer des forces (contre-)électromotrices (f.é.m), déterminer les grandeurs utiles lors d’un couplage avec les équations de circuits électrique, ou tout simplement identifier des inductances équivalentes, nous devrons calculer le flux magnétique traversant nos conducteurs (généralement des enroulements).
Par définition, le flux traversant une surface donnée $S$ est :
$$\varphi = \iint_S {\bf b}\cdot{\bf d S}$$
On peut facilement le calculer en utilisant le potentiel vecteur. En effet, en utilisant le théorème de Stokes :
$$\varphi = \iint_S ({\bf rot\,a})\cdot{\bf d S} = \oint\limits_{C =\partial S} {\bf a}\cdot{\bf d l}$$
Dans certains cas, cette formule est suffisante. Mais lorsque nous aurons des conducteurs avec des sections ne pouvant plus être considérées comme négligeables, il nous faut déterminer le « flux moyen » le traversant.
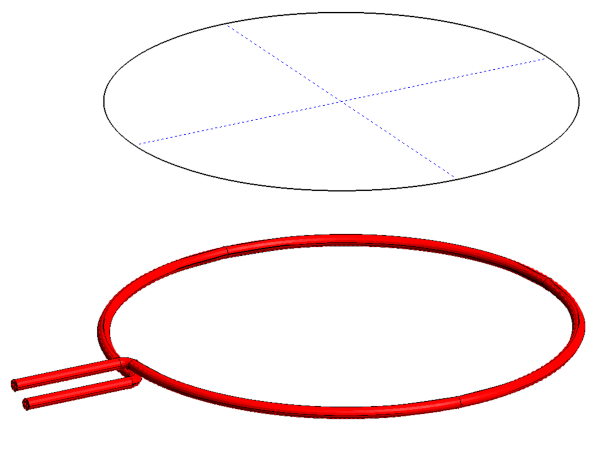
Prenons l’exemple simple d’une spire circulaire tel que schématisé ci-dessous :
Exemple simple d'une spire (en haut : circuit filiforme, en bas : géométrie réelle).
Si la section du conducteur $S_c$ est très faible, on peut considérer la spire comme un circuit filiforme (représenté en haut de la figure) et appliquer les formules ci-dessous pour calculer le flux à travers la surface en pointillés bleus.
Mais pour une géométrie plus réaliste telle que la vraie spire dessinée en rouge, on doit déterminer le flux moyen la traversant. Un moyen simple d’y parvenir est d’utiliser la valeur moyenne du potentiel vecteur ${\bf a}$ sur une section de conducteur. Soit :
${\bf u}$ étant un vecteur unitaire dirigé dans le sens du courant (orthogonal à $S_c$).
Pour un conducteur à section constante et portant un courant stationnaire $I$ :
L’expression ci-dessus est particulièrement intéressante car elle nous permet de retrouver facilement la relation entre l’énergie magnétique et le flux ou l’inductance.
En effet, on a directement :
$$\varphi = \frac{2}{I}\,W_{mag}$$
Soit :
$$\boxed{W_{mag} = \frac{1}{2}\,\varphi\,I}$$
En linéaire, puisque par définition, l’inductance $L$ du conducteur est :
$$ L = \frac{\varphi}{I}$$
On a également l’expression bien connue (valable uniquement en linéaire):
$$\boxed{W_{mag} = \frac{1}{2}\,L\,I^2}$$
Grandeurs globales : forces
Force de Lorentz
Initialement énoncée pour une particule portant une charge élémentaire $q$, la force de Lorentz est donnée par :
Cette expression peut se généraliser au cas d’une distribution volumique de sources (densités volumiques de charge $\rho_q$ et de courant ${\bf j}$) par :
Où la densité volumique de force ${\bf f_{em}}$, se décompose en deux termes :
la densité volumique de force de Coulomb ${\bf f_C}$,
la densité volumique de force de Laplace ${\bf f_L}$.
Attention
La formule ci-dessus n’est valable qu’en l’absence de milieu diélectrique ou ferromagnétique. Pour l’utiliser dans le cas général (même dans l’ARQS), il faudrait rajouter les termes correspondant à la densité de charges liées pour la force de Coulomb, et ceux liés à la densité de courants d’aimantation pour celle de Laplace (les courants induits étant pris en compte dans ${\bf j}$).
Soit quelque chose qui pourrait ressembler à :
Ainsi, en dehors du cas particulier du vide (ou de milieux analogues comme l’air), cette formule est difficilement exploitable. C’est pourquoi nous préférerons utiliser une approche énergétique.
Approche énergétique
Aspects thermodynamiques
Le système considéré étant fermé (sans échange de matière avec l’extérieur), le premier principe de la thermodynamique nous permet d’écrire la variation de son énergie interne $\mathcal{U}$ :
$T$ et $\mathcal{S}$ étant respectivement la température et l’entropie du système.
L’énergie interne est alors une fonction dont une des variables naturelles est $\mathcal{S}$. Pour faciliter la résolution de certains problèmes, les thermodynamiciens ont l’habitude de définir d’autres grandeurs énergétiques en ajoutant des termes à l’énergie interne.
en séparant dans $\mathcal{w}$ la partie liée aux électromagnétiques $\mathcal{w_{em}}$ de celle liée aux autres phénomènes physiques $\mathcal{w_{\ne em}}$.
En réinjectant le bilan de puissance vu en début de section, on obtient finalement :
En considérant que notre système est le siège d’effets purement magnétiques, la variation de la densité d’énergie libre magnétique (qu’on notera dans ce cas $f_m$) ne contient plus que les termes suivants :
On remarque donc le lien entre énergie libre et énergie magnétique. À température fixée, les deux sont identiques. En fait, compte tenu de la différence d’ordre de grandeur des constantes de temps thermiques et électromagnétiques, on pourra toujours considérer que l’énergie magnétique telle que nous l’avons définie est l’énergie libre du système.
Température et flux constants
Dans le cadre d’une transformation à température et flux magnétique constants (et donc à induction constante), nous aurons :
Ainsi, si nous voulons calculer la force ${\bf F_m}$ d’origine magnétique s’exerçant sur un élément du système pouvant se déplacer selon la coordonnée généralisée ${\bf x_0}$ à flux constant, il suffit d’écrire la variation d’énergie correspondante (en utilisant le travail de cette force) :
$$\text{d}\,\mathcal{F_m} = {\bf F_m}\cdot{\bf d x_0} + {\bf grad_{x_0}}\,(\mathcal{F_m})\cdot{\bf d x_0}$$
Puisque $\text{d}\,\mathcal{F_m} = 0$, et ${\bf grad_{x_0}}\,(\mathcal{F_m})= {\bf grad_{x_0}}\,(W_{mag})$, on en déduit l’expression de la force :
$${\bf F_m} = - {\bf grad_{x_0}}\,(W_{mag})$$
Ou encore, en exprimant la composante dans la direction de ${\bf x_0}$ :
Dans le cas d’une transformation où ce sont les courants qui sont maintenus constants, il convient de définir un nouveau potentiel thermodynamique $\mathcal{g_m}$ par :
Cette nouvelle grandeur énergétique $\mathcal{G_m}$, de densité volumique $\mathcal{g_m}$ est l’enthalpie libre magnétique (ou énergie libre de Gibbs) du système.
Remarque
On notera le lien avec la coénergie telle que définie précédemment. En fait nous pourrons considérer que la coénergie magnétique est l’opposée de l’enthalpie libre magnétique (à température fixée).
Dans le cadre d’une transformation à température et courants constants (et donc à champ magnétique constant), nous aurons :
Les formules précédentes peuvent aussi être utilisées pour calculer des couples. Si un couple $\Gamma$ d’origine magnétique s’exerce sur notre élément du système suivant la position angulaire généralisée $\alpha_0$. On aura :
Ainsi, si nous voulons calculer la force ${\bf F_m}$ d’origine magnétique s’exerçant sur un élément du système pouvant se déplacer selon la coordonnée généralisée ${\bf x_0}$ à flux constant, il suffit d’écrire la variation d’énergie correspondante (en utilisant le travail de cette force) :
$$\text{d}\,\mathcal{F_e} = {\bf F_e}\cdot{\bf d x_0} + {\bf grad_{x_0}}\,(\mathcal{F_e})\cdot{\bf d x_0}$$
Puisque $\text{d}\,\mathcal{F_e} = 0$, et ${\bf grad_{x_0}}\,(\mathcal{F_e})= {\bf grad_{x_0}}\,(W_{el})$, on en déduit l’expression de la force :
$${\bf F_e} = - {\bf grad_{x_0}}\,(W_{el})$$
Ou encore, en exprimant la composante dans la direction de ${\bf x_0}$ :
Dans le cas d’une transformation où ce sont les tensions qui sont maintenues constants, il convient de définir un nouveau potentiel thermodynamique $\mathcal{g_e}$ par :
Cette nouvelle grandeur énergétique $\mathcal{G_e}$, de densité volumique $\mathcal{g_e}$ est l’enthalpie libre électrostatique (ou énergie libre de Gibbs) du système.
Dans le cadre d’une transformation à température et tensions constantes (et donc à champ électrique constant), nous aurons :
Tenseur des contraintes électromagnétiques de Maxwell
Densité volumique de forces
Comme très brièvement dit en début de page, l’expression de la densité volumique de force électromagnétique est difficilement exploitable en pratique.
En fait, il existe plusieurs façons de la formuler et aucune ne fait encore consensus. Quelle que soit l’approche utilisée, il faut considérer les opérateurs différentiels agissant sur nos champs au sens des distributions, et plusieurs termes surfaciques interviennent alors. Ces derniers correspondent aux éventuelles densités surfaciques de sources, mais aussi aux discontinuités de paramètres physiques (perméabilité, réluctivité, aimantation) dues aux changements de milieux.
Néanmoins, dans le cas d’un milieu homogène isotrope, on peut tout de même obtenir une formulation de cette densité volumique de force.
Repartons de la formule :
En y réinjectant les équations de Maxwell-Ampère et Maxwell-Gauss et en utilisant les lois de comportement ${\bf d} = \varepsilon_0\,{\bf e} + {\bf p}$ et ${\bf b} = \mu_0\,({\bf h} + {\bf m)}$, on obtient :
Dans le cas de plusieurs milieux (et c’est généralement toujours le cas), il nous faut malheureusement rajouter les termes liés aux interfaces pour calculer la densité de force partout et pouvoir en déduire les forces ou couples s’exerçant globalement sur les pièces mobiles.
Nous disposons cependant d’une méthode plus pratique pour calculer ces forces globales : le tenseur de Maxwell.
Tenseur de Maxwell
Soit $\overline{\overline{{\bf T}}}$ champ de tenseur d’ordre 2, continûment différentiable sur le domaine d’étude $V$, tel que :
Ainsi, la force totale ${\bf F_{em}}$ s’exerçant sur un sous-domaine quelconque $\Omega \subset V$ peut se réduire à l’intégrale surfacique de $\overline{\overline{{\bf T}}}$ sur son bord $\partial \Omega$ via le théorème de la divergence :
$${\bf F_{em}} = \iiint_{\Omega} {\bf f_{em}} ~ \text{d} V = \iiint_{\Omega} \overline{\text{div}}\,\overline{\overline{{\bf T}}}~\text{d} V = \oiint_{\partial \Omega} \overline{\overline{{\bf T}}}\cdot{\bf d S}$$
Le tenseur ainsi défini n’est pas unique et peut comprendre des termes difficiles à évaluer, en particulier aux interfaces entre les différents milieux. Mais on peut simplifier grandement les choses en :
choisissant un domaine $\Omega$ entourant entièrement l’élément sur lequel on veut calculer les forces,
et dont la frontière $\partial \Omega$ se situe à l’intérieur d’un unique milieu matériel (donc sans traverser d’interface).
Dans ce cas, la formule communément admise pour le champ de tenseur sur la frontière $\partial \Omega$ est :
où $\otimes$ est le produit tensoriel et $\delta$ le tenseur unité d’ordre 2.
Remarque
Les termes du tenseur s’expriment en $\text{N}\cdot\text{m}^{-2}$, ils sont donc homogènes à une pression (on l’appelle souvent « pression électromagnétique »). Les mécaniciens parlent plutôt de « contraintes », c’est pourquoi le tenseur est généralement appelé tenseur des contraintes électromagnétiques de Maxwell.
Dans la suite, nous traiterons séparément les parties magnétiques et électrostatiques.
Partie magnétique
Si on ne considère que les effets magnétiques, le terme général du tenseur est :
Remarque : la simplification vient de $\text{div}\,{\bf b} = 0$. On pourrait faire de même pour la deuxième et troisième ligne.
Au final, on retrouve bien $\overline{\text{div}}\,\overline{\overline{{\bf T}}}={\bf f_m}$, le tenseur est bien défini dans le milieu où se situe la frontière du domaine d’intégration.
Partie électrostatique
Du côté électrostatique, la densité volumique de forces est :
Remarque : les simplifications viennent directement du fait qu’en électrostatique : ${\bf rot\,e} = {\bf 0}$. On pourrait faire de même pour la deuxième et troisième ligne.
Au final, on retrouve bien $\overline{\text{div}}\,\overline{\overline{{\bf T}}}={\bf f_e}$, le tenseur est bien défini dans le milieu où se situe la frontière du domaine d’intégration.
Synthèse
Faisons une petite synthèse de ce qui précède sur un exemple purement théorique.
Considérons un système électromagnétique de volume $V$, contenant des domaines conducteurs $V_c$ parcourus par des courants, des domaines aimantés $V_a$, et des domaines ferromagnétiques $V_m$. Le reste du domaine est constitué d’air. On désire calculer la force magnétique ${\bf F}$ s’exerçant sur l’élément correspondant au volume $V_f$. Une représentation patatoïde est donnée ci-dessous.
Représentation très schématique du problème
Il nous suffit alors de définir un domaine $\Omega$ entourant $V_f$ dont la frontière $\partial\Omega$ passe uniquement dans l’air environnant $V_f$ et d’appliquer :
$${\bf F}=\begin{pmatrix}F_x\\\\ F_y\\\\ F_z\end{pmatrix} = \oiint\limits_{\partial\Omega} \overline{\overline{{\bf T}}}\cdot{\bf d S}$$