Prise en compte du mouvement
De nombreuses applications de l’électromécanique comportent des parties mécaniques en mouvement : rotors des machines électriques, noyaux plongeurs d’électrovannes, contacts de disjoncteurs, rotors d’accouplements ou d’engrenages magnétiques, etc…
Ses pièces mobiles sont alors siège d’une variation d’induction $\frac{\partial\,{\bf b}}{\partial t}$ due au mouvement, et ceci même si les sources de champ sont constantes (courants continus ou aimants permanents). Cette variation peut ainsi créer des courants induits (courants de Foucault), voulus ou non, qu’il est nécessaire de calculer.
La formulation générale donnée précédemment permet évidemment de le faire, mais sa mise en œuvre n’est pas toujours chose aisée. Nous allons détaillons ci-dessus quelques cas assez faciles à traiter.
Mouvement de rotation en 2D : bande de roulement
Développée pour les machines électriques rotatives, la technique de la bande de roulement consiste à diviser l’entrefer en 3 zones cylindriques imbriquées (cf Figure ci-dessous) :
- une liée au stator ;
- une liée au rotor, et dont l’union avec ce dernier forme la partie mobile ;
- une zone centrale située entre les deux précédentes.
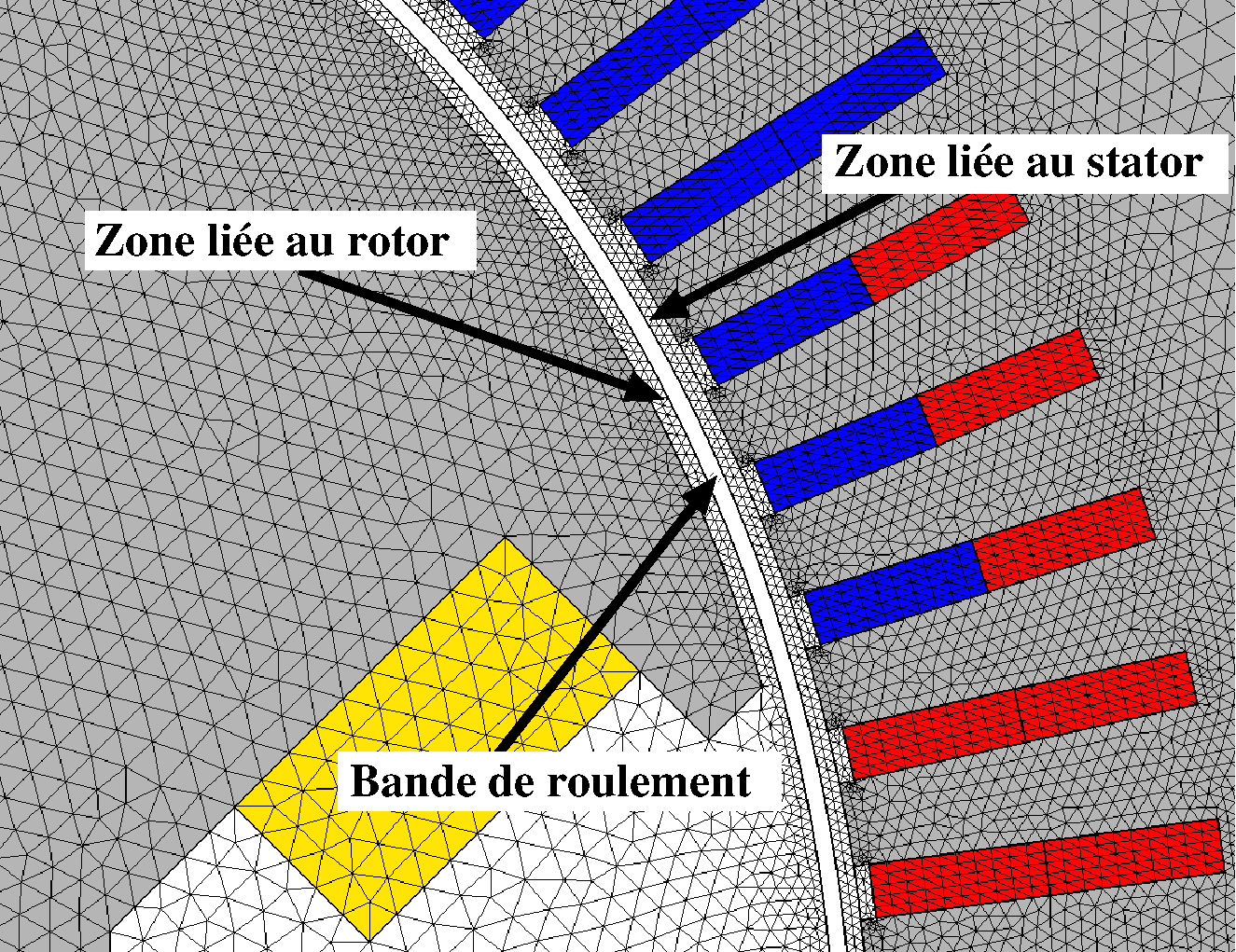
Exemple d'une bande de roulement sur une machine synchrone à pièces polaires
L’idée de base est de ne remailler que la zone centrale à chaque pas de rotation (très simple et rapide), et une rotation sera appliquée aux coordonnées des nœuds de la partie mobile. On évite ainsi de remailler la géométrie à chaque itération (évitant de devoir projeter la solution de l’instant précédent sur ce nouveau maillage pour évaluer les dérivées temporelles) et le gain de temps est assez conséquent et appréciable.
Un autre avantage est également de garantir un relativement bon maillage des entrefers en assurant d’avoir une couche d’au moins trois éléments entre les parties ferromagnétiques.
Information
- On peut utiliser la technique y compris sur des géométries réduites à un ou deux pôles en utilisant des conditions de périodicité.
- On peut également définir plusieurs bandes de roulement comme dans l’exemple ci-dessous.
Exemple : engrenage magnétique (magnetic gear)
Un engrenage magnétique est un dispositif permettant de modifier la vitesse de rotation d’un arbre sans contact mécanique. Nous modéliserons un réducteur magnétique à champ radial constitué de :
- un rotor intérieur à aimants comportant $p_1=3$ paires de pôles (celui à grande vitesse) ;
- un rotor extérieur à $p_2 = 13$ paires de pôles (celui à vitesse réduite) ;
- un stator placé entre ces deux rotors constitué de $n = p_1 + p_2 = 16$ pièces ferromagnétiques indépendantes dont le but est de moduler le champ produit par chacun des rotors afin de transmettre le couple.
Un tel dispositif permet de réduire la vitesse transmise du premier rotor au deuxième avec un facteur $p_1/p_2$, soit 3:13. La géométrie et le maillage associé sont donnés ci-dessous :
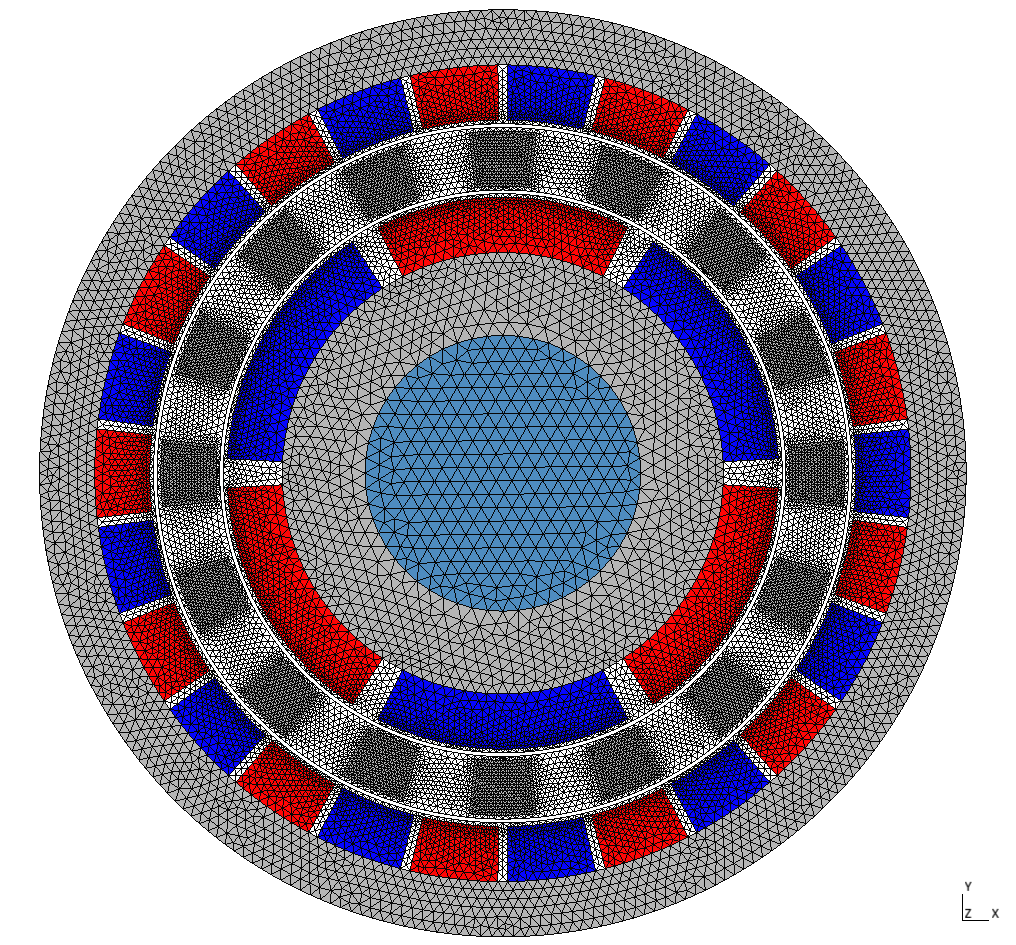
Deux bandes de roulement placées de part et d’autre du stator ont été utilisées afin de prendre en compte leurs mouvements. Après avoir implantée notre formulation magnétodynamique en transitoire, à laquelle a été rajouté des conditions permettant d’imposer un courant total nul dans chaque pièce ferromagnétique (puisqu’elles sont isolées les unes des autres), on obtient les résultats suivants :
| Norme de l’induction et lignes de champ | Courants induits dans les culasses et pièces ferromagnétiques |
|---|---|

|

|
On remarquera que la densité de courants induits dans la culasse du premier rotor est négligeable devant celles dans le stator ou le deuxième rotor.
Cas où la géométrie du problème reste invariante avec le déplacement
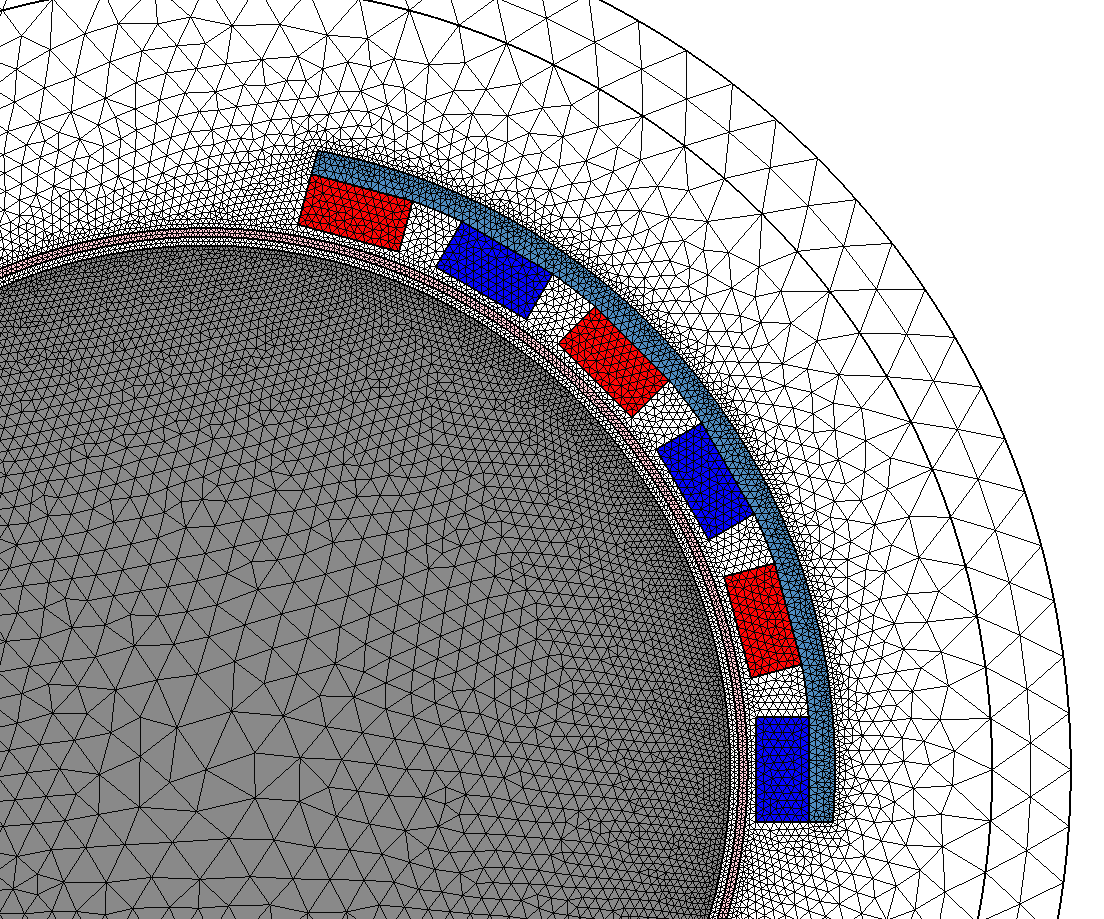
Comme dit dans le chapitre 1, dans certains cas particuliers, le problème peut se simplifier en un problème de magnétostatique équivalent en utilisant la loi d’Ohm généralisée. Pour illustrer ce principe, intéressons-nous à un dispositif particulier : un accouplement magnétique à induction à champ axial.
Le but d’un accouplement magnétique est de transmettre un mouvement de rotation entre deux parties sans contact mécanique, généralement au travers d’une paroi séparant deux milieux différents (typiquement dans une pompe par exemple). Ces accouplements sont généralement constitués de deux rotors à aimants permanents, mais il existe aussi une version asynchrone où l’un des deux rotors est réalisé avec un matériau conducteur. Un exemple est donné ci-dessous :
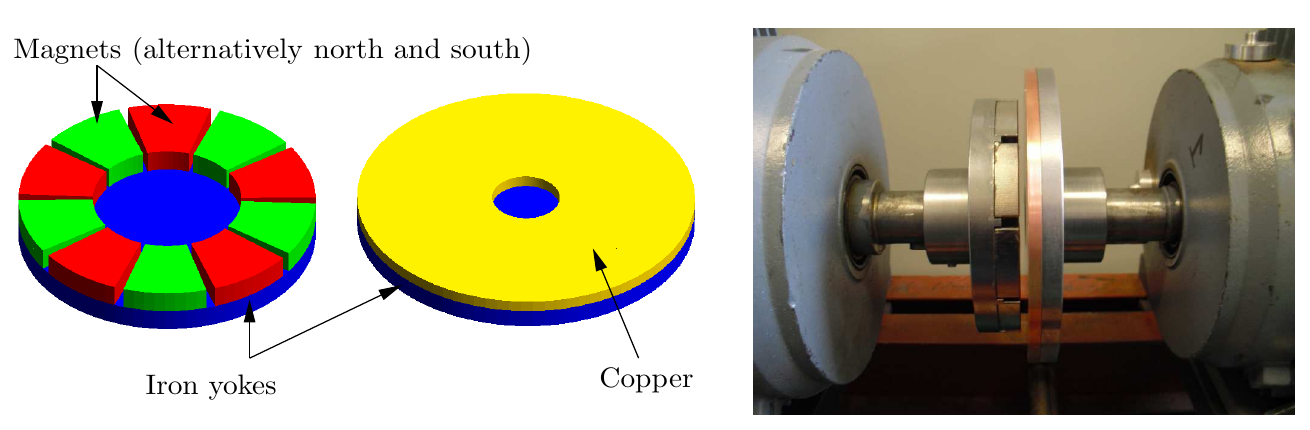
Le rotor d’entraînement est le rotor à aimant tournant à une vitesse $\Omega_1$. Lorsque celui-ci est mis en mouvement, il apparaît des courants induits dans le deuxième rotor créant un champ qui va chercher à s’aligner avec celui produit par les aimants. Le deuxième rotor va donc se mettre à tourner à une vitesse $\Omega_2$. En régime permanent il existe donc un glissement $g$ correspondant à la différence de vitesse entre les deux partie $\Omega = \Omega_1-\Omega_2$. Les courant induits sont proportionnels à cette vitesse relative, ce que nous allons redémontrer.
En nous plaçant dans le référentiel lié au premier rotor, et en développant l’équation de Maxwell-Farady dans la partie mobile (conductrice) :
$$ {\bf rot\,e} = -\frac{\partial\,{\bf b}}{\partial t} = \underbrace{- \left( \frac{\partial\,{\bf b}}{\partial x}\frac{\partial x}{\partial t} + \frac{\partial\,{\bf b}}{\partial y}\frac{\partial y}{\partial t} + \frac{\partial\,{\bf b}}{\partial z}\frac{\partial z}{\partial t}\right)}_{\displaystyle -({\bf v}\cdot{\bf grad})\,{\bf b}}$$Où ${\bf v}$ est la vitesse au point considéré, soit ici : ${\bf v} = \Omega\,{\bf u_z}\wedge{\bf x}$.
Considérons l’identité vectorielle :
$$({\bf a}\cdot\boldsymbol{\nabla})\,{\bf b} = (\boldsymbol{\nabla}\cdot{\bf b})\,{\bf a} + ({\bf a}\wedge\boldsymbol{\nabla})\wedge{\bf b} - {\bf a}\wedge(\boldsymbol{\nabla}\wedge{\bf b}).$$Comme :
$$ {\bf a}\wedge(\boldsymbol{\nabla}\wedge{\bf b})+{\bf b}\wedge({\bf a}\wedge\boldsymbol{\nabla})+\boldsymbol{\nabla}\wedge({\bf b}\wedge{\bf a}) = {\bf 0},$$on peut se ramener à :
$$({\bf a}\cdot\boldsymbol{\nabla})\,{\bf b} = (\boldsymbol{\nabla}\cdot{\bf b})\,{\bf a} + \boldsymbol{\nabla}\wedge({\bf b}\wedge{\bf a})$$Donc finalement, on obtient :
$${\bf rot\,e} = -\left( \underbrace{(\text{div}\,{\bf b})}_{=0}\,{\bf v} + {\bf rot}({\bf b}\wedge{\bf v}) \right) = {\bf rot}({\bf v}\wedge{\bf b})$$On en déduit : ${\bf rot}\,({\bf e} - {\bf v}\wedge{\bf b}) = 0$, soit :
$${\bf e} = -{\bf grad}\,v + {\bf v}\wedge{\bf b}$$La formulation à résoudre devient ainsi :
Trouver ${\bf a} \in \textbf{H}_{0}({\bf rot},\Omega)$ et ${v \in \text{H}_{0}({\bf grad},\Omega)}$ tels que :
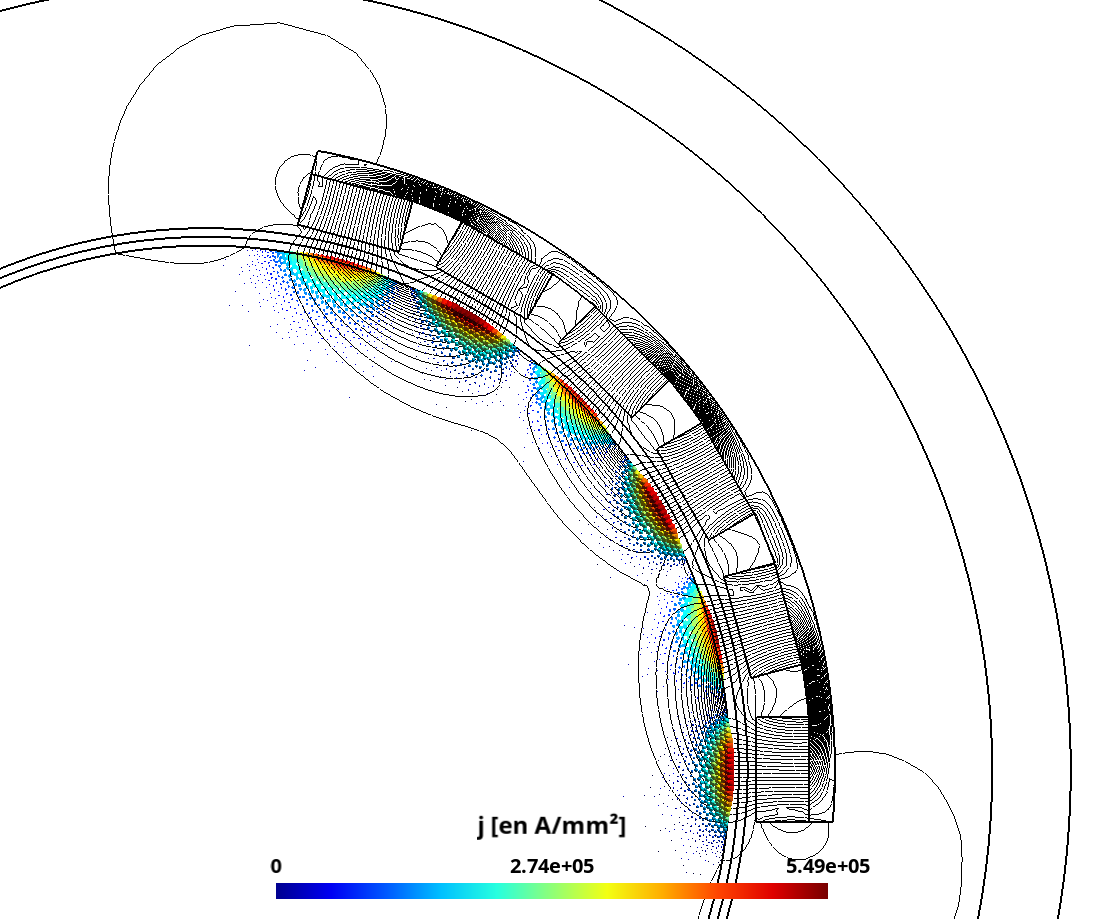
Après résolution, la densité de courants induits est :
$${\bf j} = \sigma\,\big(-{\bf grad}\,v+(\Omega\,{\bf uz}\wedge{\bf x})\wedge{\bf rot\,a}\big)$$Un exemple de maillage et de résultat est donné ci-dessous :
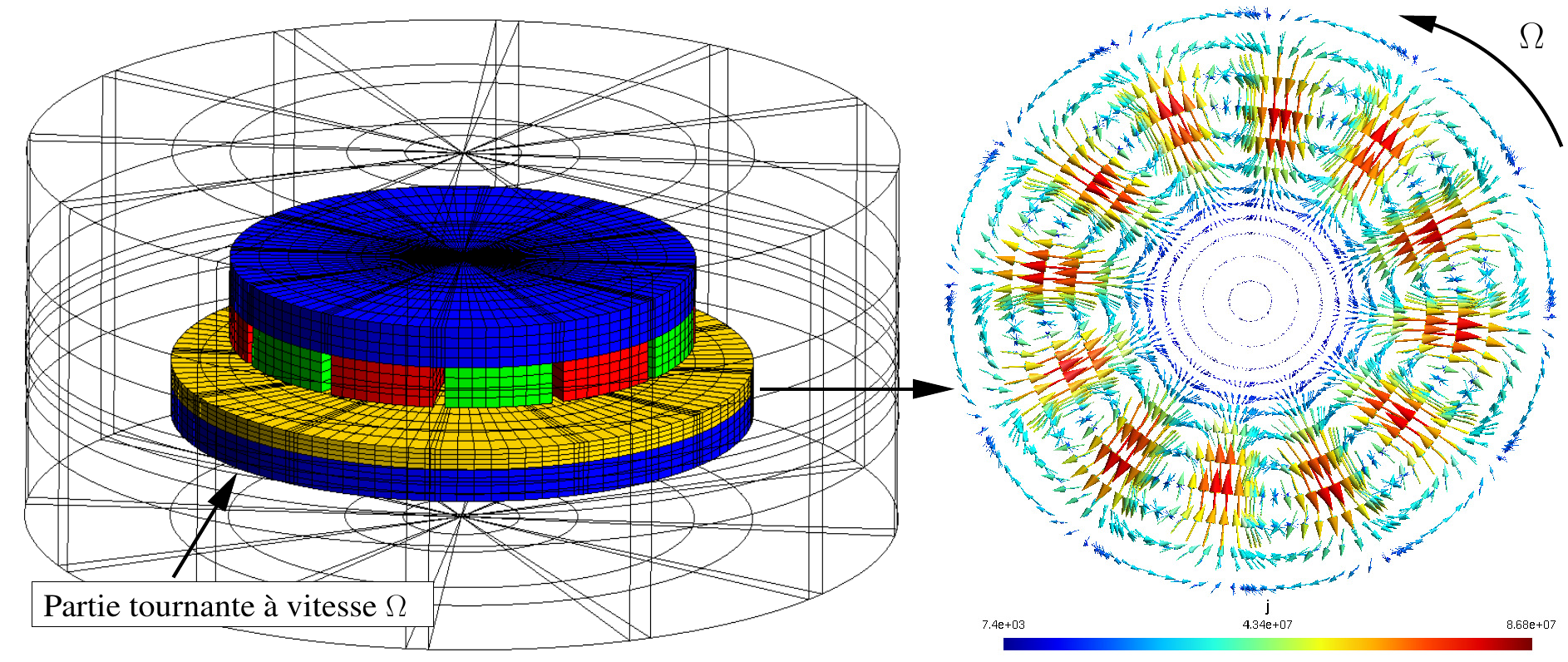
Pour plus de compléments (notamment une formulation en potentiel scalaire magnétique), vous pouvez consulter cet article.
Exercice d’application
Pour l’ultime exercice de ce module, je vous propose d’étudier un frein par courant de Foucault pour vélo d’exercice. La vidéo ci-dessous en fait une rapide présentation :
Questions
- Après avoir défini la géométrie et le maillage d’un dispositif analogue, résoudre le problème :
- en magnétodynamique : résolution magnétique transitoire avec une bande de roulement ;
- en régime permanent : magnétostatique avec loi d’Ohm généralisée.
- Comparer les résultats obtenus par les deux approches.
- Calculer le couple de frein exercé sur la roue par 3 méthodes différentes :
- directement par les pertes Joules dans la roue ;
- par intégration des forces de Laplace (une fois n’est pas coutume) ;
- par le tenseur de Maxwell.
| Exemple de maillage | Exemple de résultat |
|---|---|
|
|