La magnétostatique (en anglais magnetostatics) correspond au calcul de la distribution du champ ou de l’induction magnétiques produit par des courants continus ou des aimants.
Considérons le domaine $\Omega$ de $\mathbb{R}^3$ constitué de plusieurs sous-domaines schématisé par la figure :
$\Omega_m$ correspondant à des matériaux magnétiques ;
$\Omega_c$ correspondant à des conducteurs électriques parcourus par une densité de courant imposée par une source extérieure ${\bf j_s}$ ;
$\Omega_a$ correspondant à des aimants permanents d’induction rémanente ${\bf b_r}$ ;
une zone d’air entourant ses différents sous-domaines.
Et sa frontière $\Gamma (=\partial\Omega)$ est divisée en deux morceaux $\Gamma_d$ et $\Gamma_n$.
Les relations régissant la magnétostatique sont :
Les équations de Maxwell en statique suivantes : $$\left\{\begin{aligned}\text{div}\,{\bf b} &= 0 \\ {\bf rot}\,{\bf h} &= {\bf j_s}~\text{dans } \Omega_c, \text{ et } {\bf 0} \text{ ailleurs}\end{aligned}\right.$$
Les lois de comportements magnétiques : $$\left\{\begin{aligned}{\bf b} &= \mu_0\,{\bf h}&\text{dans l'air et }\Omega_c \\ {\bf b} &= \mu\,{\bf h} &\text{dans~}\Omega_m \\ {\bf b} &= \mu_0\mu_{ra}\, {\bf h}+{\bf b_r} &\text{dans~}\Omega_a\end{aligned}\right.$$
Les contions aux limites, par exemple :
continuité de la composante normale de l’induction : ${\bf n}\cdot{\bf b} = 0$ sur $\Gamma_d$ ;
continuité de la composante tangentielle du champ : ${\bf n}\wedge{\bf h} = {\bf 0}$ sur $\Gamma_n$.
Formulation en potentiel vecteur magnétique
Formulation forte
${\bf b}$ étant à divergence nulle, nous avons vu dans le premier chapitre, qu’il était possible de définir un potentiel vecteur magnétique ${\bf a}$ tel que :
$${\bf b} = {\bf rot}\,{\bf a}$$
En lui associant les lois de comportement et en reportant dans l’équation de Maxwell-Ampère, on obtient :
Rappelons ici que la formulation ci-dessus ne conduit pas à une solution unique comme vu dans les chapitres précédents, il nous faudra rajouter une condition de jauge sur ${\bf a}$ pour pouvoir le calculer en 3D (jauge de Coulomb ou jauge d’arbre).
Formulation en potentiel scalaire magnétique
Formulation forte
Dans le cas particulier d’un problème sans densité de courant source $({\bf j_s} = {\bf 0})$, on a : ${\bf rot}\,{\bf h} = {\bf 0}$ dans tout le domaine.
On peut alors définir un potentiel scalaire magnétique $\phi$ tel que :
$${\bf h} = -{\bf grad}\,\phi$$
En lui associant les lois de comportement et en reportant dans l’équation de Maxwell-Thomson, on obtient :
Dans le cas de problèmes 2D plans ou axisymétriques, la formulation en potentiel vecteur magnétique se ramène à calculer uniquement ses composantes $a_z(x,y)$ ou $a_\theta(r,z)$.
Dans ces cas, la jauge de Coulomb $(\text{div}\,{\bf a} = 0)$ est automatiquement vérifiée et n’a pas besoin d’être spécifiquement imposée.
Pour définir $W^1$ approximant $\textbf{H}({\bf rot},\Omega)$, il existe dans GetDP des fonctions de base spécialement dédiées. Elles sont associées à des arrêtes fictives s’appuyant sur les nœuds du domaine et perpendiculaires au plan d’étude. En pratique, nous pourrons définir notre espace d’aproximation comme suit :
Trouver les conditions aux limites à imposer aux frontières du domaine (cubique) permettant d’obtenir un champ horizontal uniforme de $1~\text{T}$ à l’intérieur.
Ajouter un cylindre au centre du domaine pour traiter les 3 cas possibles en fonction du type de matériau :
Dimensionnement d’une inductance pour électronique de puissance
Pour des besoins d’électronique de puissance (ne m’en demandez pas plus), on désire concevoir une inductance de 200 µH sous 15 A avec :
des noyaux de ferrites de type E 42/21/20 dont les caractéristiques sont fournies par cette datasheet ;
du fil de cuivre émaillé de 2,5 mm² (diamètre de 1,8 mm)
Simuler le problème correspondant et donner une solution.
Information
Après avoir traité le problème avec une loi de comportement magnétique linéaire dans la ferrite ($\mu_r$ constant), il faudra sûrement résoudre le problème en prenant en compte la non-linéarité de cette loi. Pour ce faire, je vous renvoie à cette explication très bien faite sur le wiki de GetDP.
Je vous fournis également la définition complète du matériau (N27) de la ferrite (en utilisant les mêmes notations que dans les exemples du wiki) :
Pour le calcul du couple, une bonne approche consiste à moyenner, sur le volume d’entrefer sous un pôle $(V_e = S_e\,L_z)$, l’expression obtenue par le tenseur de Maxwell. Montrer préalablement (sur papier) que cette moyenne peut s’écrire :
Conditions de Jauge sur le potentiel vecteur magnétique
Nous avons déjà vu plusieurs fois précédemment que le potentiel vecteur
magnétique ${\bf a}$ était défini à un champ de gradient près et qu’il était
donc nécessaire de le jauger pour assurer l’unicité de la solution.
Dans le chapitre précédent, deux méthodes ont été présentées
et nous allons maintenant voir leur application à nos problèmes ainsi
que la manière de les définir dans GetDP.
Jauge de Coulomb
Par application directe de la méthode du chapitre 2, nous allons définir un champ scalaire $\xi$ dont le gradient permettra d’assurer $\text{div}\,{\bf a} = 0$ en l’introduisant comme multiplicateur de Lagrange dans la formulation.
Ainsi la formulation ccomplète dans le domaine discret sera :
Le principal inconvénient de cette méthode est d’aboutir à une taille de système
conséquente conduisant à des temps de calcul élévés, c’est pourquoi on lui préfèrera
généralement la technique suivante.
Jauge d’arbre
Comme vu dans cette partie,
nous allons construire un arbre sur l’ensemble des arrêtes du domaine en partant
des surfaces sur lesquelles sont imposées des conditions particulières
(dans le cas présent, les conditions de Dirichlet) et imposer une circulation nulle
de ${\bf a}$ le long de cet arbre directement dans l’espace fonctionnel associé.
Ce dernier sera alors noté $W_{0,\text{JA}}^1$, et notre formulation devient ainsi :
Et la formulation sera strictement la même que dans les cas 2D précédents.
Applications
Retour sur notre inductance pour électronique de puissance
Dans le problème de dimensionnement d’inductance de la page précédente, nous avons
utilisé un modèle 2D alors que l’épaisseur de la ferrite utilisée est relativement faible.
Il serait donc judicieux de valider (ou non) cette hypothèse par un calcul 3D.
Pour ce faire, je vous fournis le modèle complet (réduit à un huitième de géométrie gràce aux symétries) à Télécharger ici.
Avec, vous pourrez :
tester les deux types de jauge en linéaire et non-linéaire ;
observer les valeurs des champs tels que l’induction dans le circuit magnétique par exemple :
tester votre design et vérifier si vous respectez le cahier des charges (200 µH sous 15 A) ;
tracer la valeur de l’inductance en fonction du courant :
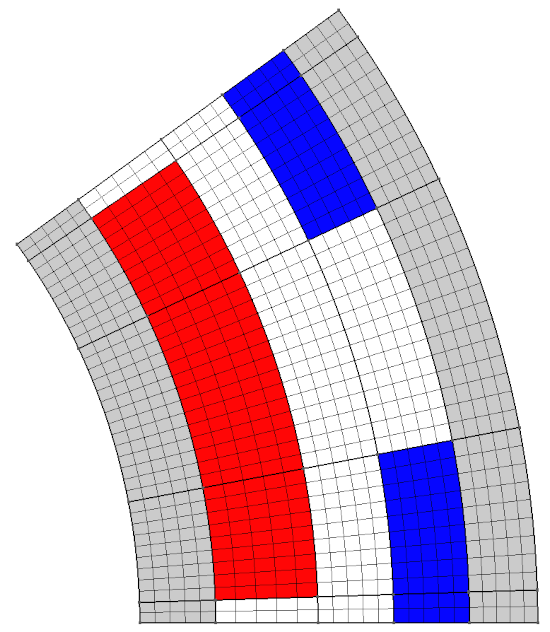
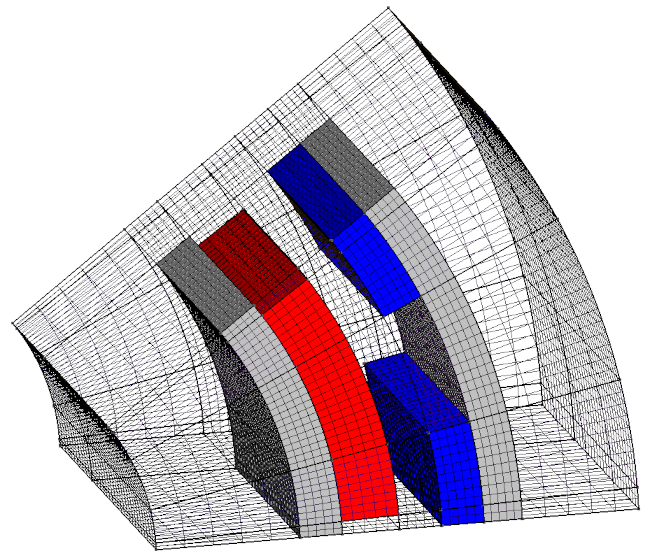
Retour sur notre accouplement à aimants permanents
L’accouplement étudié page précédente reposait lui aussi sur l’hypothèse que les
effets de bords sont négligeables et il serait opportun de le vérifier.
Résoudre le problème en 3D et comparer les deux formulations :
en potentiel vecteur magnétique (avec la jauge que vous voulez) ;
en potentiel scalaire magnétique.
Pour gagner du temps, je vous fournis encore la géométie 3D en cliquant ici. Un exemple de géométrie possible est représenté ci-dessous :