Problèmes 3D
Conditions de Jauge sur le potentiel vecteur magnétique
Nous avons déjà vu plusieurs fois précédemment que le potentiel vecteur magnétique ${\bf a}$ était défini à un champ de gradient près et qu’il était donc nécessaire de le jauger pour assurer l’unicité de la solution.
Dans le chapitre précédent, deux méthodes ont été présentées et nous allons maintenant voir leur application à nos problèmes ainsi que la manière de les définir dans GetDP.
Jauge de Coulomb
Par application directe de la méthode du chapitre 2, nous allons définir un champ scalaire $\xi$ dont le gradient permettra d’assurer $\text{div}\,{\bf a} = 0$ en l’introduisant comme multiplicateur de Lagrange dans la formulation.
Ainsi la formulation ccomplète dans le domaine discret sera :
$$\boxed{\left\{\begin{aligned}&\text{Trouver}~ {\bf a_h} \in W_0^1,~ \xi_h \in W_0^0~ \text{tels que :} \\ &\left(\mu^{-1}\,{\bf rot\,a_h},{\bf rot\,a_h'}\right)_{\Omega} + \left(\mu^{-1}\,{\bf b_r},{\bf rot\,a_h'}\right)_{\Omega_a} + \left(-{\bf j_s},{\bf a_h'}\right)_{\Omega} + \left({\bf grad}\,\xi_h,{\bf a_h'}\right)_{\Omega} = 0,~ \forall\,{\bf a_h'} \in W_0^1 \\ &\left({\bf a_h},{\bf grad}\,\xi_h'\right)_{\Omega} = 0, \forall \, \xi'_h \in W_0^0 \end{aligned}\right.}$$où $W_0^1$ et $W_0^0$ approximent respectivement $\textbf{H}_{0}({\bf rot},\Omega)$ et $\text{H}_{0}({\bf grad},\Omega)$.
Dans GetDP, il faudra d’abord définir ces deux espaces fonctionnels :
Puis la formulation correspondante (exemple pour un problème sans aimants avec lois de comportement magnétiques linéaires) :
Le principal inconvénient de cette méthode est d’aboutir à une taille de système conséquente conduisant à des temps de calcul élévés, c’est pourquoi on lui préfèrera généralement la technique suivante.
Jauge d’arbre
Comme vu dans cette partie, nous allons construire un arbre sur l’ensemble des arrêtes du domaine en partant des surfaces sur lesquelles sont imposées des conditions particulières (dans le cas présent, les conditions de Dirichlet) et imposer une circulation nulle de ${\bf a}$ le long de cet arbre directement dans l’espace fonctionnel associé. Ce dernier sera alors noté $W_{0,\text{JA}}^1$, et notre formulation devient ainsi :
$$\boxed{\left\{\begin{aligned}&\text{Trouver}~ {\bf a_h} \in W_{0,\text{JA}}^1 ~ \text{tel que :} \\ & \left(\mu^{-1}\,{\bf rot\,a_h},{\bf rot\,a_h'}\right)_{\Omega} + \left(\mu^{-1}\,{\bf b_r},{\bf rot\,a_h'}\right)_{\Omega_a} + \left(-{\bf j_s},{\bf a_h'}\right)_{\Omega} = 0,~ \forall\,{\bf a_h'} \in W_{0,\text{JA}}^1\end{aligned}\right.}$$La taille du système sera ainsi fortement réduite par rapport au cas précédent puisqu’on s’affranchit du calcul de la grandeur nodale $\xi$.
En pratique, dans GetDP cela se définit de la façon suivante :
Et la formulation sera strictement la même que dans les cas 2D précédents.
Applications
Retour sur notre inductance pour électronique de puissance
Dans le problème de dimensionnement d’inductance de la page précédente, nous avons utilisé un modèle 2D alors que l’épaisseur de la ferrite utilisée est relativement faible. Il serait donc judicieux de valider (ou non) cette hypothèse par un calcul 3D.
Pour ce faire, je vous fournis le modèle complet (réduit à un huitième de géométrie gràce aux symétries) à .
Avec, vous pourrez :
- tester les deux types de jauge en linéaire et non-linéaire ;
- observer les valeurs des champs tels que l’induction dans le circuit magnétique par exemple :

- tester votre design et vérifier si vous respectez le cahier des charges (200 µH sous 15 A) ;
- tracer la valeur de l’inductance en fonction du courant :

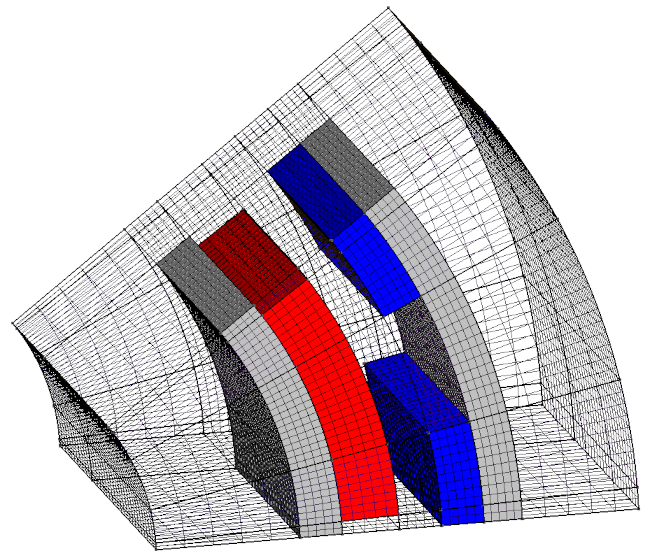
Retour sur notre accouplement à aimants permanents
L’accouplement étudié page précédente reposait lui aussi sur l’hypothèse que les effets de bords sont négligeables et il serait opportun de le vérifier.
Résoudre le problème en 3D et comparer les deux formulations :
- en potentiel vecteur magnétique (avec la jauge que vous voulez) ;
- en potentiel scalaire magnétique.
Pour gagner du temps, je vous fournis encore la géométie 3D en . Un exemple de géométrie possible est représenté ci-dessous :